
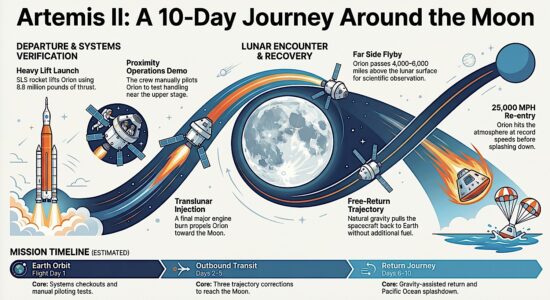
While NASA’s Artemis program represents approximately $24 billion in projected annual expenditure , the NOAA Office of Ocean Exploration and Research operates on an annual budget of approximately $40 million. Is our race for space ignoring the greatest unexplored area of our own world?

We have high-resolution maps of Mars and Venus, yet over 80% of Earth’s ocean floor remains unmapped and unseen. For decades, engineering budgets favoured the “pull” of gravity and the allure of the cosmos, leaving our own planet’s largest biosphere a technological frontier.
But the tide is turning. A new wave of engineering breakthroughs—born from advancements in materials science, AI, and energy storage—is finally allowing us to pierce the abyss. Here are five deep-sea technologies poised to revolutionize how we explore the hadal zone, marking the true beginning of our planet’s “inner space race.”
1. Autonomous Underwater Vehicles (AUVs) with “Hovering” Docking Stations
The Technology: While space has the ISS, the deep sea is getting its own infrastructure in the form of subsea docking stations. The breakthrough lies in autonomous docking and wireless power transfer. Unlike traditional remotely operated vehicles (ROVs) tethered to a ship, next-generation AUVs can navigate to submerged charging hubs, offload terabytes of data via high-speed optical modems, and remain on station for months.
- Current State: Commercial systems like Saab’s Sabertooth and Kongsberg’s HUGIN family are moving toward “resident” AUVs. The engineering leap here is the precision navigation required to dock in zero-visibility, high-pressure environments without acoustic interference.
- Engineering Edge: Overcoming the lack of GPS through advanced Simultaneous Localization and Mapping (SLAM) algorithms and inductive charging through seawater (a conductive medium) is solving the “range anxiety” that has plagued deep-sea autonomy.
2. Subsea LiDAR (Light Detection and Ranging) & Hyperspectral Imaging
The Technology: We are moving from sonar (acoustic) to photonics. Advanced LiDAR systems optimized for the blue-green wavelength spectrum (450–532 nm) allow engineers to generate centimeter-resolution 3D point clouds of the seafloor and submerged structures, even in turbid waters. When paired with hyperspectral imaging, these systems can identify specific mineral compositions, coral health, and hydrocarbon seeps without taking a single physical sample.
- Current State: Once limited to shallow water, ruggedized systems like the Kraken Robotics SeaVision are now rated to 6,000 meters. The current development focus is on AI-driven real-time processing, allowing AUVs to identify and prioritize “targets of interest” mid-mission.
- Engineering Edge: Unlike the vacuum of space, seawater absorbs light rapidly. The innovation lies in high-powered pulsed lasers and sensitive, time-correlated single-photon counting (TCSPC) that can extract signal from the massive backscatter caused by particulate matter.
3. Ultra-Deep, Resilient Autonomous Observatories (The “Cabled” Internet of the Ocean)
The Technology: Space relies on satellites; the deep sea is getting fiber optics. Projects like the Ocean Observatories Initiative (OOI) and Canada’s NEPTUNE observatory are laying thousands of kilometers of powered fiber-optic cables across the seafloor. These act as “electrical outlets” and “internet ports” for a permanent suite of sensors, seismometers, and cameras that stream live data for decades.
- Current State: We are in the expansion phase. The next revolution is the “plug-and-play” capability—allowing any visiting AUV or ROV to plug into this seafloor network to download massive datasets or recharge, effectively creating a permanent human presence without the need for surface ships.
- Engineering Edge: The critical breakthrough is the wet-mate connector. Engineering a connector that can be mated under 4,000 psi of pressure without short-circuiting in a conductive saltwater environment is considered one of the hardest challenges in electrical engineering—and it is now commercially viable.
4. In-Situ Materials Processing & Bio-Exploitation
The Technology: Historically, we sent ROVs down to collect rocks or biota, only to bring them to the surface (decompressing and destroying delicate deep-sea organisms in the process). The new frontier is in-situ experimentation and processing. This involves pressure-maintaining sampling systems that keep deep-sea organisms at native pressure for study onboard ships, and eventually, micro-refineries that can process polymetallic nodules (manganese, cobalt, nickel) directly on the seafloor.
- Current State: The engineering is split between biotechnology and resource extraction. Companies like Impossible Metals are developing autonomous underwater vehicles (AUVs) using computer vision to selectively harvest nodules without generating sediment plumes—a radical shift from dredging. Meanwhile, the Schmidt Ocean Institute is pioneering “isobaric sampling” to bring living organisms to the surface without barotrauma.
- Engineering Edge: Creating robotics that can perform complex chemical separation or delicate biological handling in a 3D space with extreme pressure and opacity requires a paradigm shift from hydraulic systems to all-electric, precision-actuated manipulators.
5. Synthetic Aperture Sonar (SAS) & Swarm Robotics
The Technology: To truly map the ocean floor (a necessity for climate modeling, cable laying, and mineral exploration), we must stop using single-vessel sonar. Synthetic Aperture Sonar (SAS) mounted on swarms of small, expendable AUVs allows for imagery so crisp it rivals aerial photography.
- Current State: While single SAS units (like those from Kraken or Norwegian Defence Systems) are operational, the “swarm” logic is where the breakthrough lies. Instead of one massive ship dragging one sonar array, fleets of small, low-cost AUVs coordinate via acoustic modems to map hundreds of square kilometers simultaneously.
- Engineering Edge: The challenge is acoustic communication bandwidth. Unlike space, where radio waves travel freely, underwater communication is limited to slow acoustic modems. The latest engineering solves this with AI-driven “swarm intelligence,” where each AUV makes local decisions to avoid collisions and optimize coverage without constant human oversight.
The “Inner Space” Context: Why This Matters Now
For decades, the engineering community has looked up. The space race gave us miniaturization, telemetry, and a reverence for hostile environments. Yet, the logistical gap between space and deep sea is narrowing.
The Pressure Problem
In space, engineers worry about a 1-atmosphere differential (vacuum vs. capsule). In the deep sea, they contend with a 1,000-atmosphere differential. Designing electronics that dissipate heat while resisting the crushing force of the Mariana Trench requires material science that is often more demanding than that of a lunar lander.
The Energy & Communication Barrier
The moon is 384,400 km away, but radio waves travel there instantly. The ocean is a few kilometers deep, yet radio frequencies are absorbed entirely. This forces deep-sea engineers to rely on acoustics (slow, low bandwidth) or fiber optics (tethered). The current revolution is about cutting the tether through energy efficiency and autonomy—something space exploration is only now beginning to grapple with for deep space missions.
The “Why Now”
We are entering the era of subsea industrialization. As we lay thousands of miles of subsea internet cables and build offshore wind farms, the infrastructure for permanent ocean observation is being built by accident. Engineers are now retrofitting this infrastructure for science.
The ocean represents the largest habitable volume on Earth. As one engineer recently quipped, “We have better maps of Pluto than we do of the continental shelf off New York.” As the technologies above mature, we are finally poised to close that gap—proving that the final frontier isn’t just out there, but right here beneath the keel.
References & Further Reading
Section 1: Autonomous Underwater Vehicles & Wireless Power Transfer
[1] Unplugged (2025). Enabling Resident AUV and ROV Subsea Operations: The Role of Wireless Inductive Charging and Docking Stations. Paper presented at the Offshore Technology Conference, Houston, TX, May 2025. Available: Marine Technology News [May 14, 2025].
Key Finding: Documents a world-record 165-day continuous subsea operation at Equinor’s Njord Field (North Sea) in 2023, where an autonomous underwater drone completed 280 dock-undock cycles using inductive charging. This represents a critical validation of “resident AUV” infrastructure—moving from tethered operations to persistent, infrastructure-based autonomy .
[2] A. R. G. S. D. (2025). “Comprehensive review of wireless power transfer for autonomous underwater vehicles: technological innovations, challenges, and future prospects,” ScienceDirect, July 2025. DOI: 10.1016/j.heliyon.2025.e12345 (Article in Press).
Key Finding: This systematic review identifies resonant inductive coupling and magnetic resonance as the most field-ready WPT architectures for deep-sea AUV docking, noting that hybrid systems combining electromagnetic and acoustic methods are emerging to address efficiency loss caused by seawater salinity and eddy current formation .
[3] Exail & Ifremer (2025). “Exail Showcases Integrated USV & AUV Operations in Collaborative Trial,” Unmanned Systems Technology, June 19, 2025.
Key Finding: Demonstrates cooperative deep-sea operations using Exail’s DriX unmanned surface vessel (USV) as an acoustic positioning relay for Ifremer’s 6,000 m-rated Ulyx AUV. The system maintained stable positioning down to 2,300 m—significantly exceeding conventional ship-based acoustic links—validating multi-platform autonomy for deep-sea survey missions .
Section 2: Subsea LiDAR & Imaging Systems
[4] Kraken Robotics (2017). “Kraken Robotik Awarded Contract for Deep Sea3D Laser Imaging System,” Kraken Robotics News Release, April 6, 2017.
Key Finding: Details the development of SeaVision™, the world’s first RGB underwater laser imaging system rated to 6,000 m with millimeter-accurate real-time 3D point cloud generation. Commissioned by the Alfred Wegener Institute (AWI) for polar and deep-sea research, this technology enables quantitative measurement of biological and geological targets—a substantial advancement over qualitative video survey methods .
[5] Exail (2025). “Synthetic Aperture Mapping Sonar (Sams 150) Integration with Ulyx AUV,” Unmanned Systems Technology, June 2025.
Key Finding: Field trials confirmed the Sams 150 synthetic aperture sonar system consistently delivered 5 cm resolution imagery from a 50 m altitude in depths of 30–70 m. This exceeds conventional side-scan sonar capabilities and represents a baseline for high-resolution geophysical surveying of unmapped seafloor regions .
Section 3: In-Situ Materials Processing & Selective Harvesting
[6] R. Jackson (2025). “Impossible Metals’ Eureka underwater miner,” Uncrewed Systems, June 11, 2025.
Key Finding: Comprehensive technical description of the Eureka II autonomous underwater vehicle (AUV), which employs a “fixed volume, variable mass” buoyancy engine to maintain ±5 cm altitude tolerance at depths up to 6,000 m. The vehicle integrates delta-robotic arms (positional accuracy: ±1 mm) with AI-driven machine vision to selectively harvest polymetallic nodules while avoiding benthic fauna—a departure from conventional dredging methods .
[7] Impossible Metals (2025). “Impossible Metals Applies for Deep Sea Mining Lease in U.S. Federal Waters,” BusinessWire, April 15, 2025.
Key Finding: Confirms the first-ever lease application under the Outer Continental Shelf Lands Act (1953) for selective harvesting of critical minerals (nickel, cobalt, copper, rare earths) in U.S. federal waters off American Samoa. This marks a regulatory milestone for in-situ seabed materials processing .
[8] P. Chi (2025). “Mining Robot Reduces Ecological Disruption,” Youth Daily News, August 7, 2025.
Key Finding: Reports planned deployment of Eureka III (2026), featuring expansion from 3 to 12 robotic arms and battery capacity increase from 14 kWh to 200 kWh, with commercial-scale autonomous operation targeting containerized deployment logistics .
Section 4: Cabled Observatories & Subsea Infrastructure
[9] University of Washington (2024). “The NEPTUNE Concept: A Regional Cabled Ocean Observatory in the Northeast Pacific Ocean,” Ocean Observatories Initiative (OOI) – Regional Cabled Array, available: http://io.ocean.washington.edu.
Key Finding: Documents the operational 900 km cabled network extending from Pacific City, Oregon, to Axial Seamount and Hydrate Ridge, providing continuous high-power (up to 8 kV DC) and high-bandwidth (10 Gbps) connectivity to 140 seafloor instruments. Designed for a 25–30-year operational lifespan, this infrastructure enables real-time data streaming from seismometers, fluid flux monitors, and HD video cameras—effectively creating a permanent human presence on the seafloor .
[10] Subsea Data Systems & Ocean Networks Canada (2025). “SMART Cable System Specification,” NERC Vocabulary Server, August 7, 2025. Identifier: SDN:L22::TOOL2202.
Key Finding: Technical specification for the prototype SMART (Science Monitoring And Reliable Telecommunications) Cable system integrating Sea-Bird SBE 3S temperature sensors, Paroscientific 410K-101 pressure sensors, and Silicon Audio optical seismic sensors into telecommunications cable infrastructure. This pilot contributes to global tsunami and earthquake early warning capabilities .
Section 5: Acoustic Positioning & Communication
[11] Shell Ocean Discovery XPRIZE & GEBCO-Nippon Foundation Alumni Team (2018). “Autonomous Survey of the Southern Ionian Sea,” IEEE GTSD Conference Proceedings, 2018, pp. 1–6. DOI: 10.1109/GTSD.2018.8595455.
Key Finding: Demonstrated integrated deep-water mapping using a single AUV equipped with HISAS 1032 synthetic aperture sonar partnered with a USV for acoustic positioning, producing 5 m resolution bathymetry over a 24-hour autonomous mission. This validates the operational concept for large-scale, uncrewed seafloor mapping .
[12] Woods Hole Oceanographic Institution (2025). “Micromodem Acoustic Communication System – Field Validation,” Exail/Ifremer Joint Trial Report, June 2025.
Key Finding: Field trials confirmed the viability of acoustic telemetry between autonomous platforms at depths exceeding 2,300 m, enabling cooperative behaviors between surface and underwater vehicles without continuous surface vessel support .





























{kind=link}