
The future of lunar exploration is leaping forward with the development of the ground-breaking WORMS (WOrk-module Robotic Modular System) prototype at the Massachusetts Institute of Technology (MIT).
This innovative robotic system offers a LEGO-like approach to space exploration. Engineers and astronauts can build and customize robots for specific tasks by combining various modules.
We’re here to delve into the WORMS prototype’s concept, design, and potential impact – keep reading. (And don’t miss the video in this feature.)
The WORMS Concept
The WORMS prototype was developed by a team of engineers at MIT, taking inspiration from the versatility and adaptability of LEGO blocks.
Just like a child can build a wide variety of structures with a single LEGO set, the WORMS system allows for the creation of multiple specialized robots by combining and rearranging different modules. This revolutionary approach simplifies the design and construction of space robots and also offers significant cost savings and increased flexibility during missions.
MIT Worms:
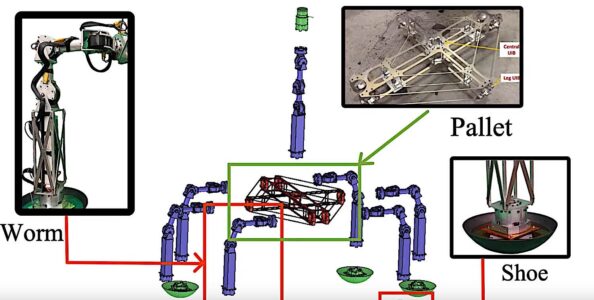
Modular Design
The modular design of the WORMS system is its main strength. Each module is designed to perform a specific function or task, and they can be easily connected or disconnected, allowing for quick reconfiguration.
Modules can include:
- Sensors
- Actuators
- Wheels
- Arms
- Payloads
This makes the system highly adaptable and able to handle the unpredictable challenges that lunar exploration can present. Using a standardized set of connectors, the WORMS system allows astronauts and engineers to build and customize robots quickly and efficiently.
These connectors are designed to be rugged and reliable, ensuring secure connections even in the challenging lunar environment. Furthermore, the WORMS system is designed to be compatible with existing space robotic platforms, supporting further collaboration and innovation
Testing and Development
The WORMS prototype has undergone extensive testing and development to ensure its reliability and effectiveness.
Researchers have subjected the system to a range of simulated lunar conditions, such as:
- Low gravity
- Extreme temperatures
- Abrasive dust
Through these tests, the team has refined the design and improved the system’s performance, ensuring that it will be ready for real-world applications.
In addition to laboratory testing, the WORMS system has been subjected to field testing. Here it’s demonstrated its ability to adapt to changing conditions and perform tasks like drilling and excavation.
This extensive testing process is essential to ensuring the system’s viability for lunar exploration.
Applications in Lunar Exploration
The WORMS system provides a wide range of potential applications in lunar exploration, from simple tasks like sample collection to more complex operations such as the construction of lunar bases.
The WORMS system can help streamline the exploration process and increase mission efficiency by enabling astronauts and engineers to create specialized robots on demand.
Some of the potential applications for the WORMS system include:
- Sample Collection: By equipping a WORMS robot with a drilling module and sample storage container, astronauts can collect and analyze lunar samples with minimal effort.
- Excavation: With the right combination of modules, a WORMS robot can excavate lunar regolith, allowing for the construction of underground habitats or the extraction of valuable resources such as water ice.
- Infrastructure Construction: WORMS robots can assemble and maintain the infrastructure necessary for lunar exploration. For example, communication relays, solar panels, and even landing pads.
- Research and Development: The modular nature of the WORMS system allows for the quick testing and deployment of new technologies. This enables scientists and engineers to explore new ideas and innovate more quickly.

Future Implications: “revolutionalize lunar exploration”
The WORMS system has the potential to revolutionize lunar exploration and set a new standard for space robotics. By providing a cost-effective, flexible, and adaptable solution, the WORMS prototype could considerably impact the future of space exploration in several ways:
- Reduced Costs: The modular nature of the WORMS system minimizes the need to design and build specialized robots for each mission. This leads to significant cost savings. This could make lunar exploration more accessible to a broader range of organizations, including private companies and smaller countries.
- Increased Flexibility: The ability to quickly reconfigure and customize robots on demand allows for a more agile response to unforeseen challenges during lunar missions. This increased flexibility can improve mission success rates and reduce the risk of expensive failures.
- Enhanced Collaboration: The standardized connectors and compatibility with existing space robotic platforms make it easier for different organizations and countries to collaborate on lunar exploration. This could lead to greater international cooperation and more ambitious joint missions. This could further advance our understanding of the Moon and its resources.
- Scalability: The modular design of the WORMS system allows it to be easily scaled up or down, depending on mission requirements. This scalability can support the development of increasingly complex lunar infrastructure, paving the way for more extensive human presence on the Moon.
- Beyond the Moon: While the WORMS system currently focuses on lunar exploration, its modular design and adaptability make it promising for the investigation of other celestial bodies, like Mars or asteroids. The WORMS prototype could serve as the foundation for a new generation of space robots capable of exploring the far reaches of our solar system.
WORMS and In-Situ Resource Utilization (ISRU)
One area where the WORMS system could prove particularly valuable is in In-Situ Resource Utilization (ISRU). This is the process of using local resources on the Moon or other celestial bodies to support exploration and settlement.
ISRU could dramatically reduce the costs and complexity of space missions by minimizing the need to transport materials and supplies from Earth.
The modular nature of the WORMS system makes it suited to support various ISRU activities:
- Water Extraction: The discovery of water ice in the lunar poles has welcomed the possibility of extracting this valuable resource for drinking, agriculture, and even fuel production. WORMS robots equipped with specialized drilling and extraction modules could be used to mine water ice and transport it to processing facilities.
- Lunar Regolith Processing: The Moon’s regolith, or surface material, contains valuable resources, like oxygen, metals, and rare earth elements. WORMS robots could be designed to excavate, transport, and process regolith, providing critical resources for life support systems, construction, and manufacturing on the Moon.
- 3D Printing: WORMS robots could be fitted with 3D printing modules to create structures, tools, and equipment using lunar regolith as a raw material. This would lessen the need to transport heavy payloads from Earth, further reducing mission costs and enhancing the sustainability of lunar settlements.
WORMS and Lunar Base Construction
As humanity moves toward establishing a sustainable presence on the Moon, the construction of lunar bases will be an essential step.
The WORMS system can play a significant role in this process, helping to assemble and maintain the infrastructure required to support human life on the Moon:
- Habitat Assembly: WORMS robots could be used to transport and assemble pre-fabricated habitat modules. This would help to create living and working spaces for astronauts. The robots could also assist in connecting these modules to power, communication, and life support systems.
- Radiation Shielding: To protect lunar inhabitants from harmful solar and cosmic radiation, WORMS robots could be used to construct radiation shielding by piling lunar regolith around habitat modules or creating purpose-built barriers.
- Repair and Maintenance: The harsh lunar environment will certainly lead to wear and tear on lunar infrastructure. WORMS robots, equipped with the apt modules, could perform regular inspections, repairs, and maintenance tasks to keep lunar bases functional and safe.
Swarm Intelligence and WORMS
Another exciting possibility for the WORMS system is the incorporation of swarm intelligence. This refers to the collective behavior of decentralized, self-organized systems, often seen in nature.
By equipping WORMS robots with swarm intelligence algorithms, various robots could work together in a coordinated and efficient manner, achieving complex tasks more rapidly and effectively than a single robot:
- Distributed Construction: A swarm of WORMS robots could work together to build large-scale infrastructure. For example, communication towers or solar arrays, by dividing tasks and sharing information in real-time.
- Exploration and Mapping: WORMS robots could work as a team to explore and map large areas of the lunar surface. Each robot could focus on a specific region and share its findings with the group.
- Cooperative Problem Solving: In the event of a malfunction or unexpected challenge, a swarm of WORMS robots could cooperate to find a solution, sharing knowledge and resources to overcome obstacles.
Embracing Modular Robotics for a Sustainable Space Future
The WORMS prototype, developed by MIT, certainly has the potential to transform lunar exploration by offering a LEGO-like solution to space robotics. Its modular design allows for the creation of highly adaptable robots capable of tackling a wide range of tasks in the challenging lunar environment.
By reducing costs, increasing flexibility, and promoting collaboration, the WORMS system may well revolutionize the way we explore the Moon and beyond, welcoming a new era of space exploration.
With potential applications in In-Situ Resource Utilization, lunar base construction, and swarm intelligence, the WORMS system shows its versatility and adaptability. As we continue to push the boundaries of human presence in space, the WORMS prototype could serve as an essential tool in achieving sustainable lunar settlements and supporting further exploration of our solar system.
This innovative approach to space robotics has the potential to change how we explore the Moon and how we approach space exploration as a whole, paving the way for a new generation of modular robots capable of tackling the challenges of the final frontier.
Learn more about recent innovations in our aerospace industry features here>>
References
- Mix-and-match kit could enable astronauts to build a menagerie of lunar exploration bots, MIT News, 2023
- Meet WORMS: The Mix-And-Match Lunar Robot Set To Revolutionize Moon Exploration, Born to Engineer, 2023
- Lordos, George & Brown, Michael & Latyshev, Kir & Liao, Aileen & Shah, Sharmi & Meza, Cesar & Cao, Cynthia & Chen, Yang & Miller, Alex & Mehrotra, Aditya & Rodriguez, Jacob & Mokkapati, Anna & Cantu, Tomas & Sapozhnikov, Katherina & Rutledge, Jessica & Trumper, David & Kim, Sangbae & de Weck, Olivier & Chun, Wendell, WORMS: Field-Reconfigurable Robots for Extreme Lunar Terrain





























{kind=link}